Drone Route Planner
This university project involved finding the best possible route a drone could take to visit a set of (fictional) air-quality sensors. To solve this problem I first use a heuristic approach to solving to travelling salesman problem, which identifies an approximate best order to visit the sensors. Then the A-Star search algorithm is used to obtain actual drone paths between 2 individual sensors.
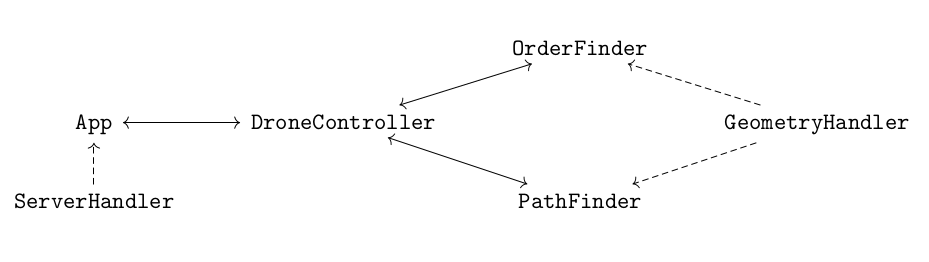
This project required a lot of careful thinking on how to best represent the problem in code. A good object oriented representation of the problem was needed to then be able to easily implement a standard graph search algorithm. Care was taken to make sure the code was efficient - for example, the Java PriorityQueue class was used to store possible drone moves in a sorted manner, which gives quickest running time for the A-Star algorithm.
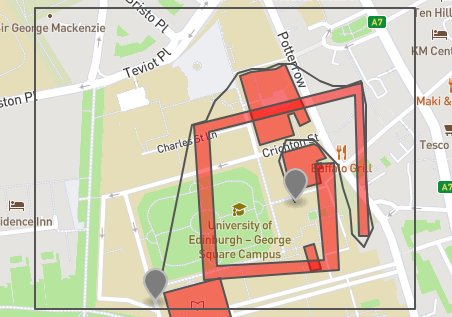
The Mapbox API was used to produce geojson data of the calculated drone routes.